
В чем заключается основная причина уменьшения устойчивости лодки
В чем заключается основная причина уменьшения устойчивости лодки

Нет. Со стороны согнутой половины стержня действует вдвое меньший момент силы, так как центр тяжести этой половины переместился вдвое ближе к оси вращения.
- 1
- 2
- 3
- 4
- 5
Толстый конец палки весит больше.
- 1
- 2
- 3
- 4
- 5
 Равновесие безразличное, так как центр тяжести шара может перемещаться лишь в горизонтальной плоскости.
Равновесие безразличное, так как центр тяжести шара может перемещаться лишь в горизонтальной плоскости.
- 1
- 2
- 3
- 4
- 5
Положение равновесия шара является безразличным для каких угодно перемещений шара по плоскости, а положение равновесия цилиндра является безразличным только для перемещения в направлении, перпендикулярном к его оси. Для перемещений цилиндра в других направлениях положение равновесия его является устойчивым.
- 1
- 2
- 3
- 4
- 5
В устойчивом и неустойчивом.
- 1
- 2
- 3
- 4
- 5
Центр тяжести находится в центре шаровой поверхности полушара.
- 1
- 2
- 3
- 4
- 5
 а) Закрывается; б) открывается.
а) Закрывается; б) открывается.
- 1
- 2
- 3
- 4
- 5
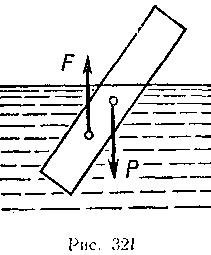 Когда полено с плотностью 600 кг/м 3 погрузится в воду немного больше, чем до половины, сила тяжести уравновесится выталкивающей силой. Но это будет неустойчивое равновесие. Сила тяжести приложена в середине полена, а выталкивающая сила – в центре вытесненного объема воды (рис. 321). Стоит полену чуть наклониться, как эти две силы образуют пару и выведут полено из состояния равновесия.
Когда полено с плотностью 600 кг/м 3 погрузится в воду немного больше, чем до половины, сила тяжести уравновесится выталкивающей силой. Но это будет неустойчивое равновесие. Сила тяжести приложена в середине полена, а выталкивающая сила – в центре вытесненного объема воды (рис. 321). Стоит полену чуть наклониться, как эти две силы образуют пару и выведут полено из состояния равновесия.
- 1
- 2
- 3
- 4
- 5
Центр тяжести пирамиды не изменит своего положения относительно самой пирамиды, но переместится относительно плоскости опоры.
- 1
- 2
- 3
- 4
- 5
Чтобы расположить центр тяжести своего тела с грузом над площадью опоры.
- 1
- 2
- 3
- 4
- 5
Если не наклонить корпус вперед, то вертикаль, проведенная через центр тяжести человека, не пересечет площади опоры (ступней ног).
- 1
- 2
- 3
- 4
- 5
Увеличивается площадь опоры, увеличивается устойчивость.
- 1
- 2
- 3
- 4
- 5
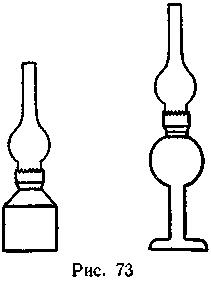 Устойчивее та лампа, у которой центр тяжести расположен ниже, т. е. левая лампа.
Устойчивее та лампа, у которой центр тяжести расположен ниже, т. е. левая лампа.
- 1
- 2
- 3
- 4
- 5
Равновесие стало менее устойчивым, так как центр тяжести всей системы переместился вверх.
- 1
- 2
- 3
- 4
- 5
Вертикаль, проведенная через центр тяжести крана, всегда проходит через его площадь опоры.
- 1
- 2
- 3
- 4
- 5
Эти башни составляют одно целое с фундаментами, зарытыми в землю. Поэтому условия их равновесия иные, чем для тел, опирающихся на горизонтальную плоскость.
- 1
- 2
- 3
- 4
- 5
Может, отбрасывая от себя какие-либо предметы.
- 1
- 2
- 3
- 4
- 5
Согласно закону сохранения импульса внутренние силы системы не могут привести в движение ее центр тяжести.
- 1
- 2
- 3
- 4
- 5
. Будет ли двигаться лодка с подобным двигателем?
Будет.
- 1
- 2
- 3
- 4
- 5
- 1
- 2
- 3
- 4
- 5
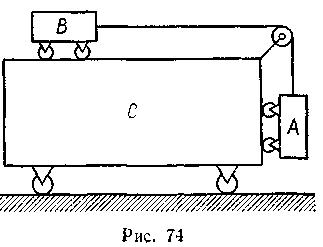 а) Как будут двигаться тележки, если в начальный момент они покоились? б) Как должна быть приложена сила F к тележке С, чтобы тело А было неподвижно относительно тележки С?
а) Как будут двигаться тележки, если в начальный момент они покоились? б) Как должна быть приложена сила F к тележке С, чтобы тело А было неподвижно относительно тележки С?
а) На тележку А действуют сила тяжести и сила упругости нити. Тело А будет равноускоренно опускаться. На тележку В действует сила тяжести, уравновешиваемая силами реакции, и сила упругости нити. Тело В будет равноускоренно двигаться вправо относительно тела С. Так как система вначале покоилась, то суммарный импульс ее равен нулю. Тело В получило импульс; следовательно, равный и противоположно направленный импульс должна получить тележка С. Итак, тело С будет равноускоренно двигаться влево относительно земли. б) Чтобы тело А (значит, и тело В) было неподвижно относительно тележки С, необходимо, чтобы тело С двигалось с тем же ускорением, что и тело В. Для этого на тележку С должна действовать направленная вправо соответствующая сила.
В чем заключается основная причина уменьшения устойчивости лодки
§ 41. Остойчивость.
Остойчивостью называется способность судна, выведенного из положения нормального равновесия какими-либо внешними силами, возвращаться в свое первоначальное положение после прекращения действия этих сил.
К внешним силам, способным вывести судно из положения нормального равновесия, относятся ветер, волны, перемещение грузов и людей, а также центробежные силы и моменты, возникающие при поворотах судна.
Судоводитель обязан знать особенности своего судна и правильно оценивать факторы, влияющие на его остойчивость. Различают поперечную и продольную остойчивость.

Рис 89 Статические силы, действующие на судно при малых накренениях.
Поперечная остойчивость судна характеризуется взаимным расположением центра тяжести G и центра величины С.
Если судно накренить па один борт на малый угол (5—10°) (рис. 89), ЦВ переместится из точки С в точку С1.
Соответственно сила поддержания, действующая перпендикулярно к поверхности, пересечет диаметральную плоскость (ДП) в точке М.
Точка пересечения ДП судна с продолжением направления силы поддержания при крепе называется начальным метацентром М. Расстояние от точки приложения силы поддержания С до начального метацентра называется метацентрическим радиусом.
Расстояние от начального метацентра М до центра тяжести G называется начальной метацентрической высотой h 0.
Начальная метацентрическая высота характеризует остойчивость при малых наклонениях судна, измеряется в метрах и является критерием начальной остойчивости судна.
Как правило, начальная метацентрическая высота мотолодок и катеров считается хорошей, если она больше 0,5 м, для некоторых судов она допустима меньше, но не менее 0,35 м.
Рекомендуется практически начальную метацентрическую высоту (для килеватых судов) определять следующим приближенным способом.

Рис. 90. Зависимость начальной метацентрической высоты от длины судна
Резким наклонением вызывается поперечная качка судна и секундомером замеряется период свободной качки, т. е. время полного размаха от одного крайнего положения до другого и обратно. Поперечную метацентрическую высоту судна определяют по формуле:
h 0 = 0,525(  ) 2 м,
) 2 м,
Т — период качки, сек.
Для оценки полученных результатов служит кривая на рис. 90, построенная по данным удачно спроектированных катеров. Если начальная метацентрическая высота h о, определенная по вышеприведенной формуле, окажется ниже заштрихованной полосы, то означает, что судно будет иметь плавную качку, но недостаточную начальную остойчивость, и плавание на нем может быть опасным.
Если метацентр расположен выше заштрихованной полосы, судно будет отличаться стремительной (резкой) качкой, но повышенной остойчивостью, и следовательно такое судно более мореходно, но обитаемость на нем неудовлетворительна. Оптимальными будут значения, попадающие в зону заштрихованной полосы.
Остойчивость мотолодки и катеров должна выдерживать следующие условия: угол крена полностью укомплектованного судна с мотором от размещения на борту груза, равного 60% установленной грузоподъемности, должен быть меньше угла заливания.
Установленная грузоподъемность судна включает в себя вес пассажиров и вес дополнительного груза (снаряжение, провиант).
Крен судна на один из бортов измеряется углом между новым наклоненным положением диаметральной плоскости с вертикальной линией. При крене на угол q равнодействующая веса судна образует с плоскостью ДП тот же угол q .
Накрененный борт будет вытеснять воды больше, чем противоположный, и ЦВ сместится в сторону крена.
Тогда равнодействующие силы поддержания и веса будут неуравновешенными, образующими пару сил с плечом, равным
Повторное действие сил веса и поддержания измеряется восстанавливающим моментом
M = Dl = Dh 0sin q .
Где D — сила плавучести, равная силе веса судна;
l — плечо остойчивости.
Эта формула называется метацентрической формулой остойчивости и справедлива только для малых углов крена, при которых метацентр можно считать постоянным.
При больших углах крена метацентр не является постоянным, вследствие чего нарушается линейная зависимость между восстанавливающим моментом и углами крена.
Взаимным расположением груза на судне судоводитель всегда может найти наиболее выгодное значение метацентрической высоты, при которой судно будет достаточно остойчивым и меньше подвергаться качке.
Кренящим моментом называется произведение веса груза, перемещаемого поперек судна, на плечо, равное расстоянию перемещения. Если человек весом 75 кг, сидящий на банке, переместится поперек судна на 0,5 м, то кренящий момент будет равен 75*0,5 = 37,5 кг/м.

Рис 91. Диаграмма статической остойчивости
Для изменения момента, накреняющего судно па 10°, надо загрузить судно до полного водоизмещения совершенно симметрично относительно диаметральной плоскости.
Загрузку судна следует проверить по осадкам, измеряемым с обоих бортов. Креномер устанавливается строго перпендикулярно диаметральной плоскости таким образом, чтобы он показал 0°.
После этого надо перемещать грузы (например, людей) на заранее размеченные расстояния до тех пор, пока креномер не покажет 10°. Опыт для проверки следует произвести так: накренить судно на один, а затем на другой борт.
Зная крепящие моменты накреняющего судно на различные (до наибольшего возможного) углы, можно построить диаграмму статической остойчивости (рис. 91), что оценит остойчивость судна.
Остойчивость можно увеличивать за счет увеличения ширины судна, понижения ЦТ, устройства кормовых булей.
Если центр тяжести судна расположен ниже центра величины, то судно считается весьма остойчивым, так как сила поддержания при крене не изменяется по величине и направлению, но точка ее приложения смещается в сторону наклона судна (рис. 92, а).
Поэтому при крене образуется пара сил с положительным восстанавливающим моментом, стремящимся вернуть судно в нормальное вертикальное положение па прямой киль. Легко убедиться, что h>0, при этом метацентрическая высота равна 0. Это типично для яхт с тяжелым килем и нетипично для более крупных судов с обычным устройством корпуса.
Если центр тяжести расположен выше центра величины, то возможны три случая остойчивости, которые судоводитель должен хорошо знать.
Первый случай остойчивости.
Метацентрическая высота h>0. Если центр тяжести расположен выше центра величины, то при наклонном положении судна линия действия силы поддержания пересекает диаметральную плоскость выше центра тяжести (рис. 92, б).

Рис. 92. Случай остойчивого судна
В этом случае также образуется пара сил с положительным восстанавливающим моментом. Это типично для большинства судов обычной формы. Остойчивость в этом случае зависит от корпуса и положения центра тяжести по высоте.
При крене кренящийся борт входит в воду и создает дополнительную плавучесть, стремящуюся выровнять судно. Однако при крене судна с жидкими и сыпучими грузами, способными перемещаться в сторону крена, центр тяжести также сместится в сторону крена. Если центр тяжести при крене переместится за отвесную линию, соединяющую центр величины с метацентром, то судно опрокинется.
Второй случай неостойчивого судка при безразличном равновесии.
Метацентрическая высота h = 0. Если центр тяжести лежит выше центра величины, то при крене линия действия силы поддержания проходит через центр тяжести MG = 0 (рис. 93).
В данном случае центр величины всегда располагается на одной вертикали с центром тяжести, поэтому восстанавливающаяся пара сил отсутствует. Без воздействия внешних сил судно не может вернуться в прямое положение.
В данном случае особо опасно и совершенно недопустимо перевозить на судне жидкие и сыпучие грузы: при самой незначительной качке судно перевернется. Это свойственно шлюпкам с круглым шпангоутом.
Третий случай неостойчивого судна при неустойчивом равновесии.
Метацентрическая высота h
Сила тяжести и сила поддержания при малейшем крене образуют пару сил с отрицательным восстанавливающим моментом и судно опрокидывается.

Рис. 93. Случай неостойчивого судна при безразличном равновесии

Рис. 94. Случай неостойчивого судна при неустойчивом равновесии
Разобранные случаи показывают, что судно остойчиво, если метацентр расположен выше центра тяжести судна.
Чем ниже опускается центр тяжести, тем судно более остойчиво. Практически это достигается расположением грузов не на палубе, а в нижних помещениях и трюмах.
Устойчивость движения и маневренность
- Рубрика:
- Обучение |
- Основы теории подводной лодки
Устойчивое движение является необходимым качеством подводной лодки, обеспечивающим удержание заданного направления её движения в различных условиях плавания. При движении подводной лодки на неё могут действовать не только рассмотренные выше основные статические и гидродинамические силы, но и случайные возмущения, обусловленные, например, случайной перекладкой рулей, местным течением, изменением плотности забортной воды и т. п. Движение подводной лодки после действия возмущений, если не принимать никаких мер по управлению, называется свободным возмущенным движением. При этом могут изменяться параметры движения подводной лодки: углы атаки и дифферента, угловая скорость ωz, глубина погружения. С точки зрения обеспечения устойчивости движения очень важно знать, как поведет себя подводная лодка после прекращения действия возмущающей силы.
В свободном возмущенном движении возможны три случая изменения параметров:
— параметры движения со временем возвращаются к значению параметров исходного невозмущенного движения, и в этом случае исходное движение является устойчивым;
— параметры движения со временем принимают установившиеся постоянные значения, отличающиеся от исходных, исходное движение в этом случае называется неасимптотически устойчивым;
— параметры возмущенного движения с течением времени не возвращаются к параметрам исходного движения и продолжают изменяться, в этом случае исходное движение является неустойчивым.
Таким образом, по характеру изменения параметров в свободном возмущенном движении можно судить об устойчивости движения подводной лодки, под которой понимается ее способность сохранять заданное направление движения, возвращаться к нему после воздействия различного рода случайных возмущений. Устойчивость движения считается автоматической, если она определяется по свободному возмущенному движению подводной лодки без учёта управляющих воздействий, в частности, перекладок рулей. Способность подводной лодки сохранять заданный режим движения в допустимых пределах за счёт действия перекладок рулей называются эксплуатационной устойчивостью.
Подводная лодка может не обладать автоматической устойчивостью, но обеспечение эксплуатационной устойчивости для неё обязательно. Поскольку эксплуатационная устойчивость зависит от автоматической, то для оценки управляемости подводной лодки необходимо рассмотрение автоматической устойчивости её движения. При этом в зависимости от учёта количества изменяющихся параметров движения различаются статическая и динамическая устойчивость движения.
Статическая устойчивость оценивается по изменению одного параметра в свободном возмущенном движении при условии, что остальные параметры остаются неизменными. Так, статическая устойчивость движения подводной лодки в вертикальной плоскости оценивается по углу атаки. Если при изменении угла атаки в результате случайного возмущения гидродинамический момент Мzα изменяется так, что стремится вернуть подводную лодку к исходному углу атаки, то подводная лодка статически устойчива. В противном случае имеет место статическая неустойчивость.
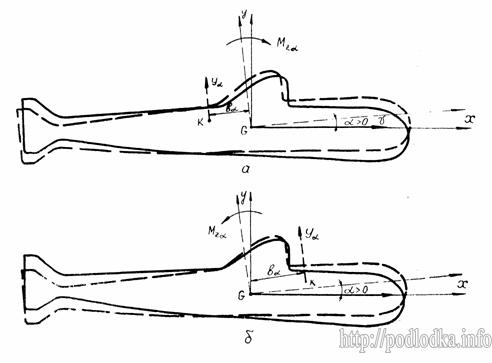
Рис. 14. Статически устойчивая (а) и статически неустойчивая (б) подводная лодка по углу атаки
Если внешнего воздействия на подводную лодку угол атаки получил некоторое приращение α, то вследствие этого возникает гидродинамический момент Мzα = Yαвα, где вα — расстояние от центра давления, в котором приложена нормальная гидродинамическая сила Y1α, до центра тяжести по длине подводной лодки (рис. 14а). Когда центр давления расположен в корме от центра тяжести (вα 0), то возникающий при изменении угла атаки момент способствует ещё большему увеличению угла атаки; подводная лодка статически неустойчива (рис. 14б).
Таким образом, условием статической устойчивости подводной лодки по углу атаки является вα 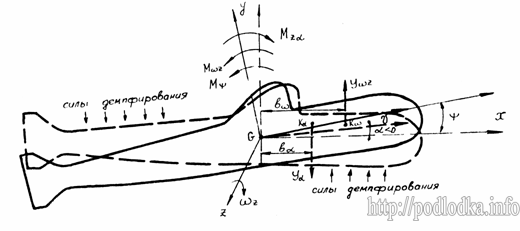
Рис. 15. Динамическая устойчивость движения подводной лодки
Совместное воздействие на подводную лодку всех сил и моментов может привести к уменьшению первоначального приращения угла атаки α, вызванного возмущением. Если параметры возмущенного движения с течением времени будут приближаться к параметрам исходного невозмущенного движения, то подводная лодка обладает динамической устойчивостью. Условием динамической устойчивости движения статически неустойчивой подводной лодки является превышение демпфирующего момента Mωz над позиционным гидродинамическим моментом Mzα. Это условие выполняется в том случае, когда точка приложения равнодействующей сил демпфирования Kω расположена в нос от центра давления Kα (рис. 15). За критерий динамической устойчивости принимается отношение вω/вα, которое у динамически устойчивой подводной лодки должно быть больше 1. Критерий динамической устойчивости современных подводных лодок находится в пределах 1.3—3,0,
Следует отметить, что критерий динамической устойчивости не учитывает влияния восстанавливающего момента, который всегда препятствует отклонению подводной лодки и повышает таким образом динамическую устойчивость движения подводной лодки в вертикальной плоскости.
Динамическая устойчивость подводной лодки по глубине погружения является неасимптотической, т. е. после возмущения подводная лодка возвращается к исходному установившемуся движению, но на новой глубине. Удержание подводной лодки на заданной глубине обеспечивается за счёт эксплуатационной устойчивости перекладкой горизонтальных рулей.
Эксплуатационная устойчивость оценивается по числу перекладок рулей в единицу времени, необходимых для удержания подводной лодки на заданной глубине. Считается, что подводная лодка обладает достаточной эксплуатационной устойчивостью, если для удержания глубины погружения с точностью ±0,25 м требуется не более пяти перекладок горизонтальных рулей в одну минуту.
Маневренностью называется способность подводной лодки изменять направление своего движения за определенное время под действием органов управления. Для количественной оценки маневренности подводной лодки в вертикальной плоскости вводится понятие интенсивности управляемости. Интенсивностью управляемости называется приращение угла траектории, приходящееся на единицу угла перекладки горизонтальных рулей.
Перекладка рулей на угол δ у подводной лодки, движущейся по прямолинейной траектории (рис. 16а), приводит к отклонению вектора скорости от горизонтальной линии, т. е. к появлению угла траектории χ (рис. 16б). Отношение величины угла траектории к величине угла перекладки горизонтальных рулей и представляет собой интенсивность управляемости. Более точным выражением для интенсивности управляемости является производная от угла траектории по углу перекладки горизонтальных рулей dχ/dδ. По интенсивности управляемости можно судить о послушности подводной лодки горизонтальным рулям при оценке маневренных качеств в процессе проектирования и при управлении подводной лодкой на практике. Чем больше интенсивность управляемости, т. е. чем больший угол траектории соответствует единице угла перекладки горизонтальных рулей, тем лучше подводная лодка слушается горизонтальных рулей.
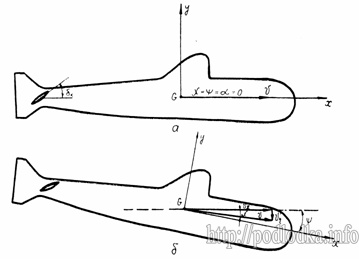
Рис. 16. Возникновение угла траектории при перекладки кормовых горизонтальных рулей
Интенсивность управляемости зависит от позиционных гидродинамических характеристик подводной лодки, сё остойчивости, расположения рулей и изменяется с изменением скорости хода подводной лодки. Зависимость интенсивности управляемости от скорости подводной лодки при раздельном использовании носовых и кормовых горизонтальных рулей представлена на рис. 17. Кривые dχ/dδн = f (v) и dχ/dδк = f (v) показывают, что на средних и больших скоростях интенсивность управляемости при использовании кормовых горизонтальных рулей значительно выше, чем при использовании носовых рулей. Это объясняется более эффективным дифферентующим воздействием на подводную лодку перекладки кормовых горизонтальных рулей по сравнению с перекладкой носовых рулей. Наиболее существенное увеличение интенсивности управляемости при управлении кормовыми горизонтальными рулями происходит на больших скоростях хода подводной лодки. В то же время график dχ/dδк = f (v) показывает, что на малых скоростях интенсивность управляемости при использовании кормовых горизонтальных рулей очень мала и при некоторой скорости vi становится равной нулю. Это означает, что при скорости vi перекладка кормовых горизонтальных рулей на любой угол не приводит к изменению угла траектории. Такое явление принято называть потерей управляемости подводной лодки. Скорость хода, при которой имеет место потеря управляемости подводной лодки, называется инверсионной скоростью.
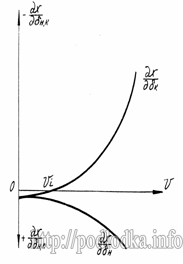
Рис. 17. Интенсивность управляемости
Причиной потери управляемости при управлении кормовыми горизонтальными рулями является противоположное направление нормальной силы на рулях, возникающей при их перекладке, и момента, создаваемого этой силой. Так, перекладка кормовых горизонтальных рулей на погружение приводит к созданию подъёмной силы и дифферентующего на нос момента Мzк. За счет угла атаки на корпус подводной лодки начинает действовать топящая сила, создающая также дифферентующий момент на нос Мzα, а за счёт угла дифферента возникает восстанавливающий момент Mψ. Моменты Мzк и Мzα зависят от скорости подводной лодки, а момент Mψ не зависит.
С уменьшением скорости подводной лодки роль восстанавливающего момента Mψ в общем балансе сил и моментов значительно возрастает Мzк и Мzα) и при инверсионной скорости Mψ = Мzк + Мzα, что и приводит к потере управляемости. Кроме того, при такой скорости наступает примерное равенство подъёмной силы на рулях и топящей силы на корпусе подводной лодки. У современных подводных лодок инверсионная скорость имеет величину 1,5—4,0 узла.
Зная величину интенсивности управляемости, можно по заданному углу перекладки рулей определить угол траектории, создаваемый этой перекладкой.
Поскольку в действительности на подводной лодке угол траектории и угол атаки наблюдать невозможно, а об изменении направления движения судят по углу дифферента, то в инструкции по управляемости подводной лодки вместо критерия dχ/dδ используется критерии dψ/dδ, т. е. производная oт угла дифферента по углу перекладки рулей. Для практического использования рассчитываются и строятся графики изменения угла дифферента при перекладке горизонтальных рулей на 1° в зависимости от скорости хода и времени, прошедшего с момента перекладки. Такие графики строятся для каждой пары рулей.
Кроме интенсивности управляемости, для характеристики маневренности подводной лодки в вертикальной плоскости служит скороподъемность. Скороподъемностью подводной лодки называется приращение скорости вертикального перемещения vη приходящееся на единицу угла перекладки горизонтальных рулей. По аналогии с интенсивностью управляемости скороподъёмность подводной лодки принято характеризовать производной от скорости vη по углу перекладки горизонтальных рулей dvη/dδ.
Поскольку vη = v sinχ ≈ vχ, то скороподъёмность подводной лодки может быть выражена dvη/dδ = d (vχ)/dδ = vdχ/dδ, т. е. она прямо пропорциональна интенсивности управляемости и скорости хода подводной лодки.
Скороподъемность при использовании кормовых горизонтальных рулей значительно больше, чем при использовании носовых рулей. Это является следствием более высокой интенсивности управляемости подводной лодки кормовыми рулями. С увеличением скорости подводной лодки скороподъемность при использовании кормовых горизонтальных рулей резко возрастает. Поэтому во избежание резких изменений глубины не следует на больших скоростях хода перекладывать кормовые горизонтальные рули на большие углы. Так, например, если у подводной лодки на скорости 25 узлов переложить большие кормовые горизонтальные рули на 1°, то примерно через 2 минуты глубина погружения изменится на 160 м. Это определяется по кривым изменения глубины погружения при перекладке горизонтальных рулей на 1°, которые приводятся для каждой пары рулей в инструкции по управляемости подводной лодки.
при больших скоростях гидродинамические силы и моменты значительно превышают статические, а на малых скоростях хода статические силы и моменты соизмеримы с гидродинамическими и оказывают существенное влияние на управляемость подводной лодки;
при перекладки носовых рулей на них возникает сила и дифферентующий момент одного знака, а сила и момент от кормовых рулей имеют противоположные знаки;
при параллельной перекладке рулей на них возникают силы одного знака (или подъёмные, или топящие), но эти силы создают противоположно направленные моменты, при положении рулей взраздрай силы на рулях имеют различные знаки, а моменты от них действуют в одну сторону;
носовые горизонтальные рули эффективны для обеспечения основного режима движения на малых скоростях хода, а кормовые — на больших скоростях хода, поэтому при раздельном использовании рулей балансировка подводной лодки осуществляется на малых скоростях с помощью носовых, а на больших скоростях — с помощью кормовых горизонтальных рулей;
подводная лодка обладает динамической неасимптотической устойчивостью по глубине погружения является, т. е. после возмущения подводная лодка возвращается к исходному установившемуся движению, но на новой глубине. Удержание подводной лодки на заданной глубине обеспечивается за счёт эксплуатационной устойчивости перекладкой горизонтальных рулей;
маневренность подводной лодки характеризуется интенсивностью управляемости и скорстеподъемностью.
TNI: Удастся ли российским подлодкам потопить американский флот в случае войны?
В ВМС США с тревогой наблюдают за «усиливающейся угрозой» со стороны подводного флота России и Китая, однако проблема скорее заключается в том, что возможности американской противолодочной обороны существенно ослабли, считает редактор американского журнала по военно-политической тематике The National Interest (TNI) Дейв Маджумдар.

«Соединенные Штаты вместе со своими партнерами по НАТО допустили серьезное отставание в вопросах противолодочной обороны, поскольку их внимание было приковано к войнам в Ираке и Афганистане», — уверен капитан первого ранга в отставке Джерри Хендрикс, работающий директором программы военных стратегий и оценок в Центре новой американской безопасности (Center for a New American Security).
Редактор TNI, ссылаясь на опубликованный недавно доклад Центра стратегических и международных исследований (CSIS) под названием «Подводная война в Северной Европе», сообщает, что сегодня в боевом составе ВМФ РФ имеется примерно 56 подводных лодок, но, как утверждается, «в эксплуатационной готовности находится меньше». В Народно-освободительной армии Китая (НОАК) имеется около 70 субмарин, однако по своим качественным характеристикам они существенно отстают от американских и российских.
По данным CSIS, в составе ВМС США имеется примерно 52 ударные субмарины при потребности 48 лодок, но к 2029 году их останется 41. Военно-морское командование США признает, что 48 лодок — это слишком мало, и в настоящее время изучает возможности по увеличению этой цифры. Однако у американских ВМС мало возможностей для количественного увеличения подводного флота.
«В конце 20-х — начале 30-х годов мы достигнем минимума в количестве 40−41 лодка, и только потом начнем выбираться из этой ямы, — заявил контр-адмирал Майкл Джебели, возглавляющий в ВМС США программу строительства подлодок. — В данный момент мы не в состоянии решить эту проблему. Это результат решений, принятых много лет назад».
Как отмечает Маджумдар, «поскольку Россия и Китай наращивают активность своих подводных сил, американские ВМС ощущают острую потребность усовершенствовать свою систему противолодочной обороны».
«Россия и Китай могут серьезно осложнить оперативные планы ВМС США, — пояснил капитан Хендрикс. — Дело в том, что нашу основу составляют силы передового базирования, размещенные в 19 морских регионах мира, где у нас есть четко обозначенные национальные интересы. Все, что надо сделать России и Китаю, это направить несколько своих подлодок в те воды, где действуют наши корабли разных типов, начиная с кораблей прибрежной зоны и кончая суперавианосцами. И мы это сразу заметим».
Проблема не только в недостаточном финансировании работ по противолодочной обороне. Налицо явное снижение уровня боевой подготовки ВМС США, говорится в статье.
«Мы прилагаем недостаточно усилий к тому, чтобы наши противолодочные силы были на высоте. На авианосцах больше нет S-3 Viking (палубный противолодочный самолет), а экипажи вертолетов с опускаемыми гидролокаторами на учениях последних лет недостаточно оттачивают свои навыки, из-за чего командиры ударных групп не могут сказать, что в спорных водах они чувствуют себя в безопасности, — комментирует Хендрикс. — Кроме того, экипажи наших надводных кораблей с носовыми гидролокаторами и пассивными кормовыми гидроакустическими станциями также подготовлены недостаточно, особенно к борьбе с опасными целями, такими как современные атомные подводные лодки и лучшие дизельные субмарины, и они не всегда знают, что им надо делать».
Кроме того, отмечают американские военные эксперты, от недостаточного уровня подготовки ВМС страдают не только ударные авианосные группы и надводные корабли, но и морская патрульная авиация, базирующаяся на берегу и ведущая охоту за субмаринами. У экипажей этих самолетов недостаточно опыта для успешного противодействия «растущей угрозе со стороны подводного флота России и Китая».
«Летчики морской патрульной авиации мало летают на своих новых противолодочных самолетах P-8 Poseidon и поэтому не могут быть уверены в своих навыках при ведении масштабной противолодочной борьбы. Нам нужны крупные учения по противолодочной обороне против малошумных лодок, и нам нужно много таких учений», — заявил Хендрикс.
Резюмируя, редактор The National Interest отмечает, что у Китая есть крупные подводные силы, но «его субмарины технически несовершенны, поэтому КНР предстоит еще многое сделать, прежде чем она войдет в высшую военно-морскую лигу и сможет составить конкуренцию США и России».
Проблема для США и НАТО состоит скорее не в усиливающемся российском флоте, а в отсутствии у Запада современных средств противолодочной борьбы, уверены эксперты.

